Valvole di regolazione motorizzate
Valvole di regolazione
motorizzate
MCV
Caratteristiche della valvola
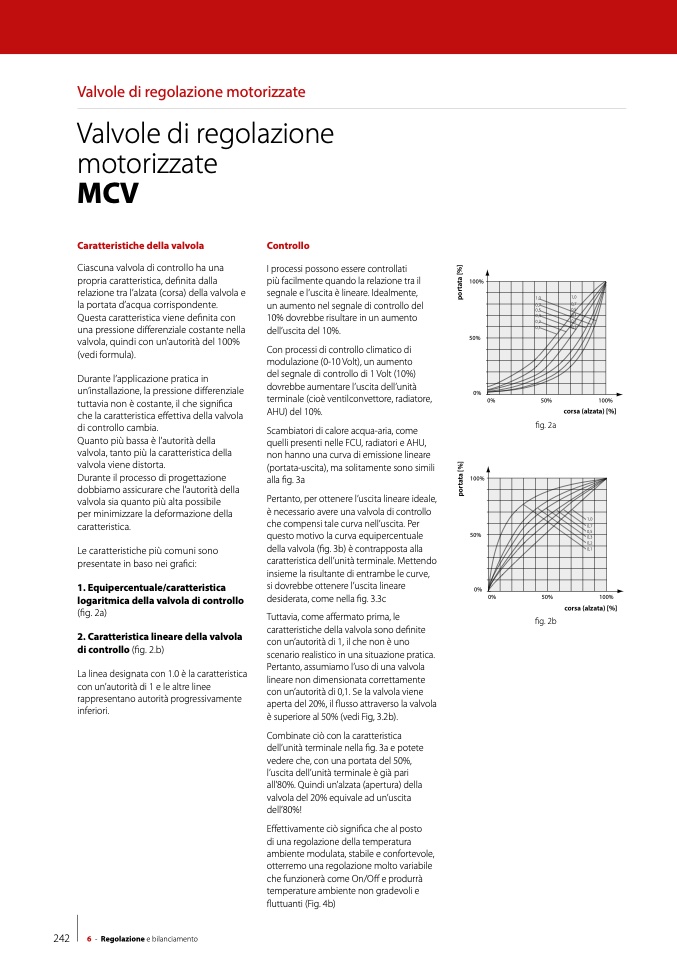
Ciascuna valvola di controllo ha una
propria caratteristica, definita dalla
relazione tra l’alzata (corsa) della valvola e
la portata d’acqua corrispondente.
Questa caratteristica viene definita con
una pressione differenziale costante nella
valvola, quindi con un’autorità del 100%
(vedi formula).
Durante l’applicazione pratica in
un’installazione, la pressione differenziale
tuttavia non è costante, il che significa
che la caratteristica effettiva della valvola
di controllo cambia.
Quanto più bassa è l’autorità della
valvola, tanto più la caratteristica della
valvola viene distorta.
Durante il processo di progettazione
dobbiamo assicurare che l’autorità della
valvola sia quanto più alta possibile
per minimizzare la deformazione della
caratteristica.
Le caratteristiche più comuni sono
presentate in baso nei grafici:
1. Equipercentuale/caratteristica
logaritmica della valvola di controllo
(fig. 2a)
2. Caratteristica lineare della valvola
di controllo (fig. 2.b)
La linea designata con 1.0 è la caratteristica
con un’autorità di 1 e le altre linee
rappresentano autorità progressivamente
inferiori.
Controllo
I processi possono essere controllati
più facilmente quando la relazione tra il
100%
segnale e l’uscita è lineare. Idealmente,
un aumento nel segnale di controllo del
10% dovrebbe risultare in un aumento
dell’uscita del 10%.
50%
Con processi di controllo climatico di
modulazione (0-10 Volt), un aumento
del segnale di controllo di 1 Volt (10%)
dovrebbe aumentare l’uscita dell’unità
0%
terminale (cioè ventilconvettore, radiatore,
0%
50%
100%
corsa (alzata) [%]
fig. 2a
1,0
0,7
0,5
0,3
0,2
0,1
1,0
0,7
0,5
0,3
0,2
0,1
AHU) del 10%.
Scambiatori di calore acqua-aria, come
quelli presenti nelle FCU, radiatori e AHU,
non hanno una curva di emissione lineare
(portata-uscita), ma solitamente sono simili
100%
alla fig. 3a
Pertanto, per ottenere l’u
100%
1,0
1,0
0,7
0,5
0,7
0,5
0,3
0,2
0,3
0,2
0,1
0,1
è necessario av
0,5
0,5
che compensi t
nell’uscita. Per
1,0
1,0
0,7
7
,3
e
0
0
0
desiderata, come nella fig. 3.3c
0%
50%
100%
,1
cita lineare ideale,
lvola di controllo
le curva
reunav
,3
0,2
0,2
a
0,1
questo motivo la curva equipercentuale
della valvola (fig. 3b) è contrapposta alla
caratteristica dell’unità terminale. Mettendo
insieme la risultante di entrambe le curve,
si dovrebbe ottenere l’uscita lineare
0,
s
a
50%
50%
0%
0%
0%
50%
100%
corsa (alzata) [%]
Tuttavia, come affermato prima, le
caratteristiche della valvola sono definite
con un’autorità di 1, il che non è uno
scenario realistico in una situazione pratica.
Pertanto, assumiamo l’uso di una valvola
lineare non dimensionata correttamente
con un’autorità di 0,1. Se la valvola viene
aperta del 20%, il flusso attraverso la valvola
è superiore al 50% (vedi Fig, 3.2b).
Combinate ciò con la caratteristica
dell’unità terminale nella fig. 3a e potete
vedere che, con una portata del 50%,
l’uscita dell’unità terminale è già pari
all’80%. Quindi un’alzata (apertura) della
valvola del 20% equivale ad un’uscita
dell’80%!
Effettivamente ciò significa che al posto
di una regolazione della temperatura
ambiente modulata, stabile e confortevole,
otterremo una regolazione molto variabile
che funzionerà come On/Off e produrrà
temperature ambiente non gradevoli e
fluttuanti (Fig. 4b)
corsa (alzata) [%]
fig. 2b
242
6 - Regolazione e bilanciamento
p
o
r
t
a
t
a
[
%
]
p
o
r
t
a
t
a
[
%
]
p
o
r
t
a
t
a
[
%
]
p
o
r
t
a
t
a
[
%
]

